
选择题
试题详情
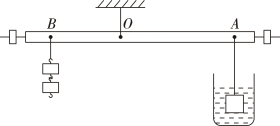
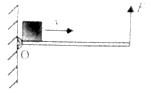
物理小组的同学利用杠杆制成一种多功能杆秤,使用前调节杠杆处于水平平衡,她取来质量为100g的实心金属块挂在A处,且浸没于水中,在B处挂上100g钩码,杠杆恰好处于水平平衡,如图所示,测得OA=50cm,OB=40cm,则金属块的密度为( )
- A、 2g/cm3
- B、 1.25g/cm3
- C、 2.7g/cm3
- D、 5g/cm3
试题详情
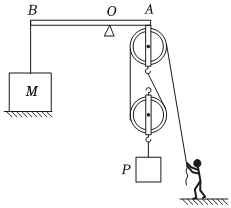
建筑工地上常用的吊装工具如图所示, 为重
为重 的配重,杠杆
的配重,杠杆 的支点为
的支点为 , 已知
, 已知 :
: 1:2,滑轮下面挂有建筑材料
1:2,滑轮下面挂有建筑材料 , 每个滑轮重为
, 每个滑轮重为 , 工人重为
, 工人重为 , 杠杆与绳的自重、滑轮组摩擦均不计。下列说法正确的是( )
, 杠杆与绳的自重、滑轮组摩擦均不计。下列说法正确的是( )
- A、 建筑材料
- B、 当工人拉绳的力为
时,建筑材料
- C、 当工人拉绳的力为
- D、 当建筑材料的重为
时,滑轮组的机械效率最大为
试题详情
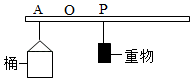
如图,将直杆沿重心O点处悬挂起来,空桶挂于A点,质量为M的重物挂在P点时,杆恰好水平平衡,当桶内装满不同密度液体时,重物需要悬挂在不同位置,才能使杆在水平位置再次平衡,若在杆上相应位置标上密度值,就能直接读出桶中液体的密度。下列方法中,能使该直杆密度计的测量精度更高一些的是( )
- A、 减小AO之间的距离
- B、 减小重物质量
- C、 减小桶的容积
- D、 增大桶的质量
试题详情
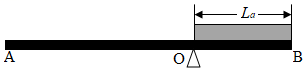
现有一根形变不计、长为L的铁条AB和两根横截面积相同、长度分别为LA、LB的铝条A、B,将铝条A叠在铁条AB上,并使它们的右端对齐,然后把它们放置在三角形支架O上,AB水平平衡,此时OB的距离恰好为LA , 如图所示。取下铝条A后,将铝条B按上述操作方法使铁条AB再次水平平衡,此时OB的距离为Lx . 下列判断正确的是( )
- A、 若LA<LB<L,则LA<Lx<
成立
- B、 若LA<LB<L,则Lx>
- C、 若LB<LA ,
- D、 若LB<LA , 则Lx<
试题详情
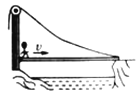
如图所示,有一质量不计的长木板,左端装有与墙相连的轴在它的左端放一重为G的物块,并用一竖直向上的力F拉着右端。当物块向右匀速滑动时,木板始终在水平位置保持静止,在此过程中,拉力F( )
- A、 变小
- B、 变大
- C、 不变
- D、 先变大后变小


试题详情
如图所示,用轻质材料制成的吊桥搭在河对岸.一个人从桥的左端匀速走到桥的右端,桥面始终是水平的,不计吊桥和绳的重力,人从吊桥左端出发时开始计时.则人在吊桥上行走过程中,吊桥右端所受地面支持力F与人行走时间t的关系图像是
- A、

- B、

- C、

- D、

试题详情
轻质硬杆AB长50cm。用长短不同的线把边长为10cm的立方体甲和体积是1dm3的球乙分别拴在杆的两端。在距A点20cm处的O点支起AB时,甲静止在桌面上,乙悬空,杆AB处于水平平衡。将乙浸没在水中后,杆AB仍平衡,如图所示。下列说法中正确的是( )(取g=10N/kg)

- A、 杆A端受力增加了15N
- B、 杆A端受力减小了10N
- C、 甲对水平桌面的压强增加了1500Pa
- D、 甲对水平桌面的压强减小了1500Pa
试题详情
如图所示,一根粗细均匀的铁棒AB静止在水平地面上,现用力F将铁棒从水平地面拉至竖直立起。在这个过程中,力F作用在A端且始终与铁棒垂直,则用力F将( )

- A、 逐渐变小
- B、 逐渐变大
- C、 保持不变
- D、 先变小后变大
填空题
试题详情
小明在学校运动会上是仪仗队手,如图所示。他竖直举旗前进时,风给旗水平向右的阻力为 , 其作用点可以看成在
, 其作用点可以看成在 点。已知
点。已知 ,
,  。小明的两只手分别位于
。小明的两只手分别位于 、
、 两点,他用一只手握紧旗杆不让它下滑,用另一只手拉住旗杆不让它倾斜。则另一只手对旗杆加的最小拉力为
两点,他用一只手握紧旗杆不让它下滑,用另一只手拉住旗杆不让它倾斜。则另一只手对旗杆加的最小拉力为 , 方向。
, 方向。

试题详情
如图所示,台秤上放一只质量不计的三角支架,均匀细木棒 可绕点自由转动,调整点高度,使水平静止,此时台秤示数如图,:
可绕点自由转动,调整点高度,使水平静止,此时台秤示数如图,: :
: , 则木棒自重为 ;仅将台秤和支架一起向左平移一段距离,台秤的示数将
, 则木棒自重为 ;仅将台秤和支架一起向左平移一段距离,台秤的示数将  选填“增大”“减小”或“不变”
选填“增大”“减小”或“不变” 。
。 取
取

试题详情
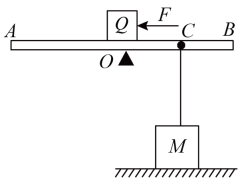
如图所示,用轻质薄木板AB做成杠杆,O为支点,OA=OB=2m,地面上一质量为2kg,边长为a=10cm的实心正方体物块M,用一不可伸长的轻质细线系于OB的中点C处,此时AB恰好静止于水平位置,细线恰好被拉直。现将小滑块Q(小滑块的大小不计)放于O点上方,将小滑块Q向左移动0.4m,此时绳子对C点的拉力为8N,此时物块M对水平地面的压强Pa,若Q再向左侧移动0.2m,沿竖直方向将正方体M左右两边各切去厚度为d的部分,将它们叠放在Q的正上方时,正方体M对地面的压强为0,切去厚度d为m。
实验探究题
试题详情
小明在探究“杠杆的平衡条件”实验中

计算题
试题详情
某快递公司针对快递分拣问题,研发出了一项“黑科技” 分拣机器人。如图甲,分拣机器人通过扫码,读取快递的目的地信息,然后准确快速地把快递运送并投入相应的分拣口,最后由专人打包,将快递运往全国各地。已知分拣机器人的行走速度为
分拣机器人。如图甲,分拣机器人通过扫码,读取快递的目的地信息,然后准确快速地把快递运送并投入相应的分拣口,最后由专人打包,将快递运往全国各地。已知分拣机器人的行走速度为 , 空载时的质量是
, 空载时的质量是 , 轮子与水平地面的接触面积一共是
, 轮子与水平地面的接触面积一共是 。
。


